
研究背景
深拖多道地震系统(图1)一般由高频震源和接收器阵列拖缆组成,在海底上方几十米到几百米之间工作,是刻画精细尺度海底沉积层不可或缺的装备,广泛运用于地质灾害调查、高分辨率地层结构成像和天然气水合物等资源勘探领域。在近海底作业期间,受到洋流、拖航速度波动、浮力和海底复杂形态的综合影响,接收器阵列拖缆会经历复杂的非线性运动和剧烈的姿态变化和位置波动。因此,需要对接收器阵列的几何形态进行高精度重建和校正。然而,前人研究采用的海底反射波和海面反射波反演方法仅能反演垂直平面的二维几何形态,缺少横向漂移位移的反演,且较难验证反演的准确性。
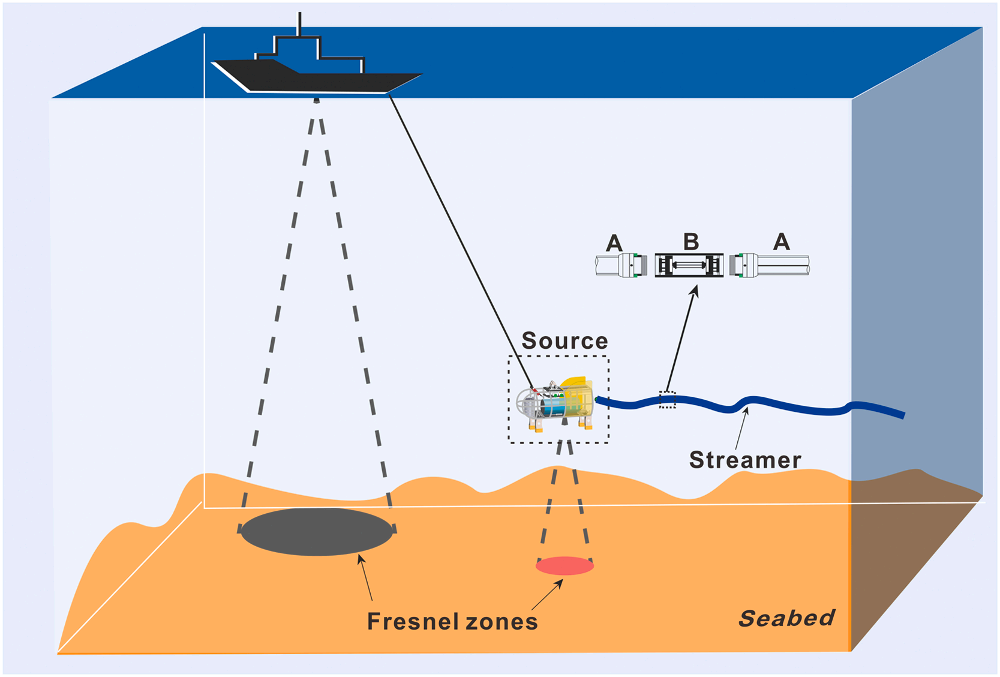
图1 深拖多道地震系统
研究成果
针对这一工程难题,海底科学与划界全国重点实验室的24级硕士研究生周祎辰(第一作者)在导师孔凡圣研究员(通讯作者)的指导下,提出了一种利用惯性测量单元(IMU)数据对拖缆进行高精度三维几何反演的新方法,流程如图2所示。该反演方法历经三个主要过程,即节点姿态更新、节点速度更新和位置更新。根据传感器存在的漂移误差和积分累积误差引入了卡尔曼滤波器进行修正,并开发了运动学合成数据生成模块对算法可靠性和准确性进行了模拟验证。该方法不但可以反演拖缆的三维几何形态,且因为反演过程为单节点解耦运算,可以对数据缺失的节点进行插值重建,提高了数据的利用率,规避了前人研究普遍采用的沿拖缆积分算法中不可避免的累积误差。
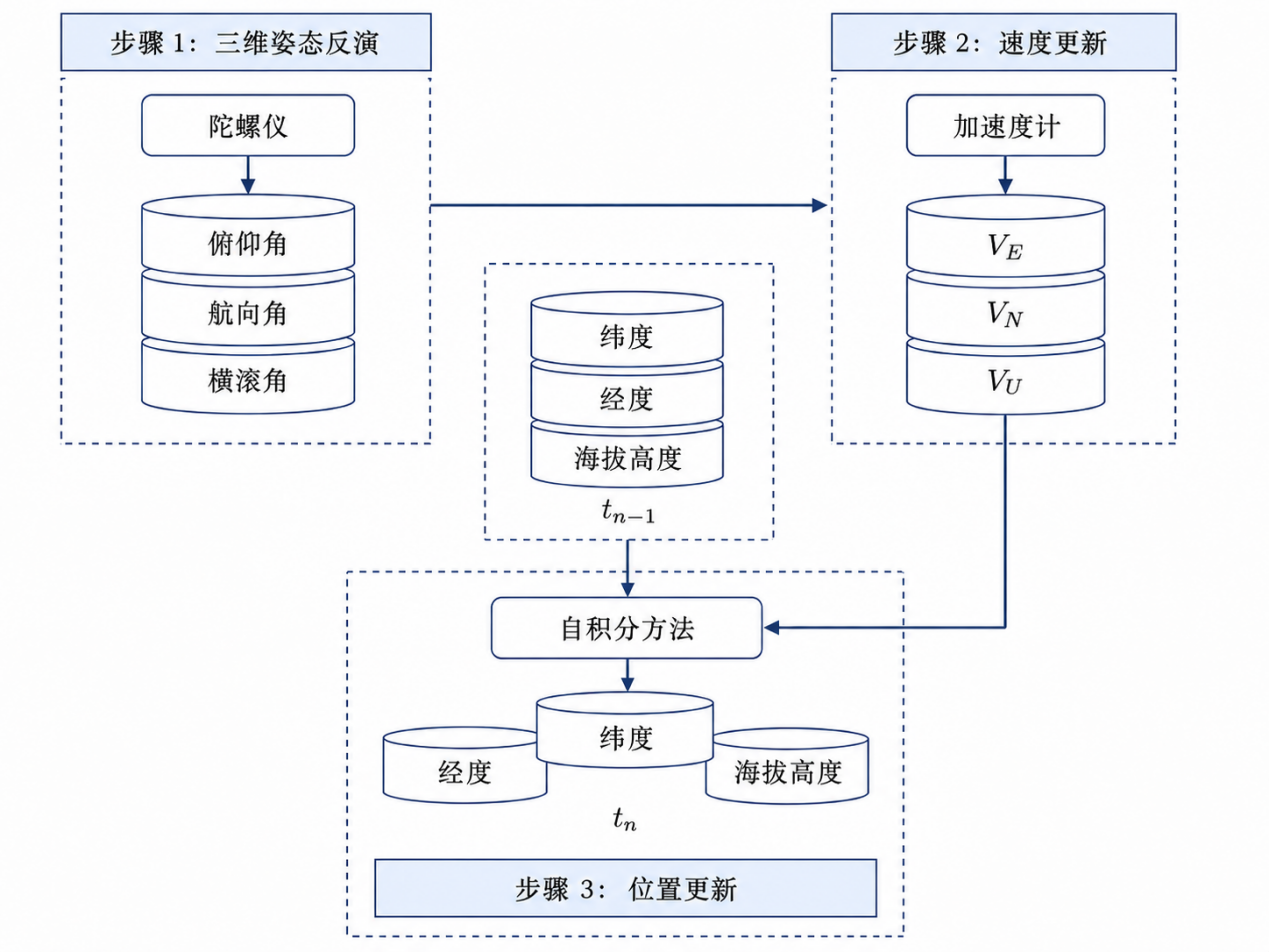
图2 算法流程图
本研究对该算法进行了两种不同误差情景(正常误差和极端误差)的测试。测试结果表明,在正常误差设置条件下,该算法性能出色,反演得到的理论值和预设的真实值十分接近;而在极端误差情况的测试中,由于初始误差较大,反演经历了一段短暂的时间后逐渐收敛,且在单节点爬升和俯冲阶段反演精度较高。在未来工作中,作者们会尝试应用更先进的自适应卡尔曼滤波器和多模型滤波器进一步提高反演精度和准确性。该方法首次将惯性导航相关技术运用到近海底地震拖缆的高精度几何反演中,并且采用卡尔曼滤波器进行误差修正,能够满足拖缆三维姿态的高精度几何反演需求,为深拖多道地震拖缆的三维几何反演提供了一种稳健的解决方案,促进了浅海底沉积层的高分辨率地震成像和相关研究。
已根据该研究成果进行了软件著作权的申请,并且实现了软件开源,供学习和交流。开源地址为:https://gitee.com/joechen1154/deep-drag-inversion。

图3 软件著作权
文章信息
该论文成果最近发表在工程学领域期刊 Results in Engineering (6/175 in the Engineering, Multidisciplinary category,IF=7.9)上。本研究得到了国家自然科学基金、浙江省自然科学基金和国家重点研发项目的资助。
Zhou, Y. (周祎辰), Kong, F*. (孔凡圣). Three-Dimensional Streamer Geometry Inversion Based on Self-Integration of Inertial Measurement Unit Data for Deep-Towed Multichannel Seismic Exploration. Results in Engineering, 2026, 30, 111205. https://doi.org/10.1016/j.rineng.2026.111205
