
研究背景
近浅海区域人口密集、经济活动频繁,各类开发与管理活动的开展均依赖于高精度水深基础地理信息的支撑。当前水深测量主要依赖于船载声呐技术,但其在近海探测时存在效率低、风险高、成本倍增的缺陷。2018年,搭载单光子激光雷达的ICESat-2卫星发射并投入运行,其可以实现浅海水深的快速测量。然而,水体与大气散射等多源干扰会引入分布复杂且缺乏稳定模式的探测噪声,在动态复杂观测环境下,现有基于密度聚类或滤波的光子筛选方法难以自适应地识别海底与海面反射信号,这一问题已成为制约ICESat-2自动化测深应用的关键瓶颈。
研究成果
针对上述瓶颈问题,我室海底地貌演化与沉积过程学术团队博士后秦晓铭(第一作者)和吴自银研究员(通讯作者),提出了一种光子密度剖面引导的跨模态信息融合方法(DECOMPOSE),用于ICESat-2光子识别及水深测量(图1)。该方法的一个分支将ICESat-2光子信号投影至测线方向,通过池化构建二维光子密度剖面图像,利用卷积模型的大感受野有效抑制局部异常噪声干扰;另一分支则聚焦于三维光子点云的精细结构,依托自注意力机制实现高细粒度的点云互相关建模。两个分支分别对应图像与点云两类模态,通过跨模态信息同步(C-MIS)机制完成特征对齐与融合,使DECOMPOSE兼具全局噪声抑制与局部细节保留的双重优势,显著提升了光子识别与水深测量的精度。在与训练数据地理不重叠的测试数据上,所提方法在各项光子识别评价指标上均显著优于现有方法(图2),其平均交互比提升超过15%;而在真实世界数据跨区域卫星测深推理中,所提方法仍能保持稳定的测深精度,其整体的均方根误差仅为0.4938米且拟合优度超过0.98(图3)。
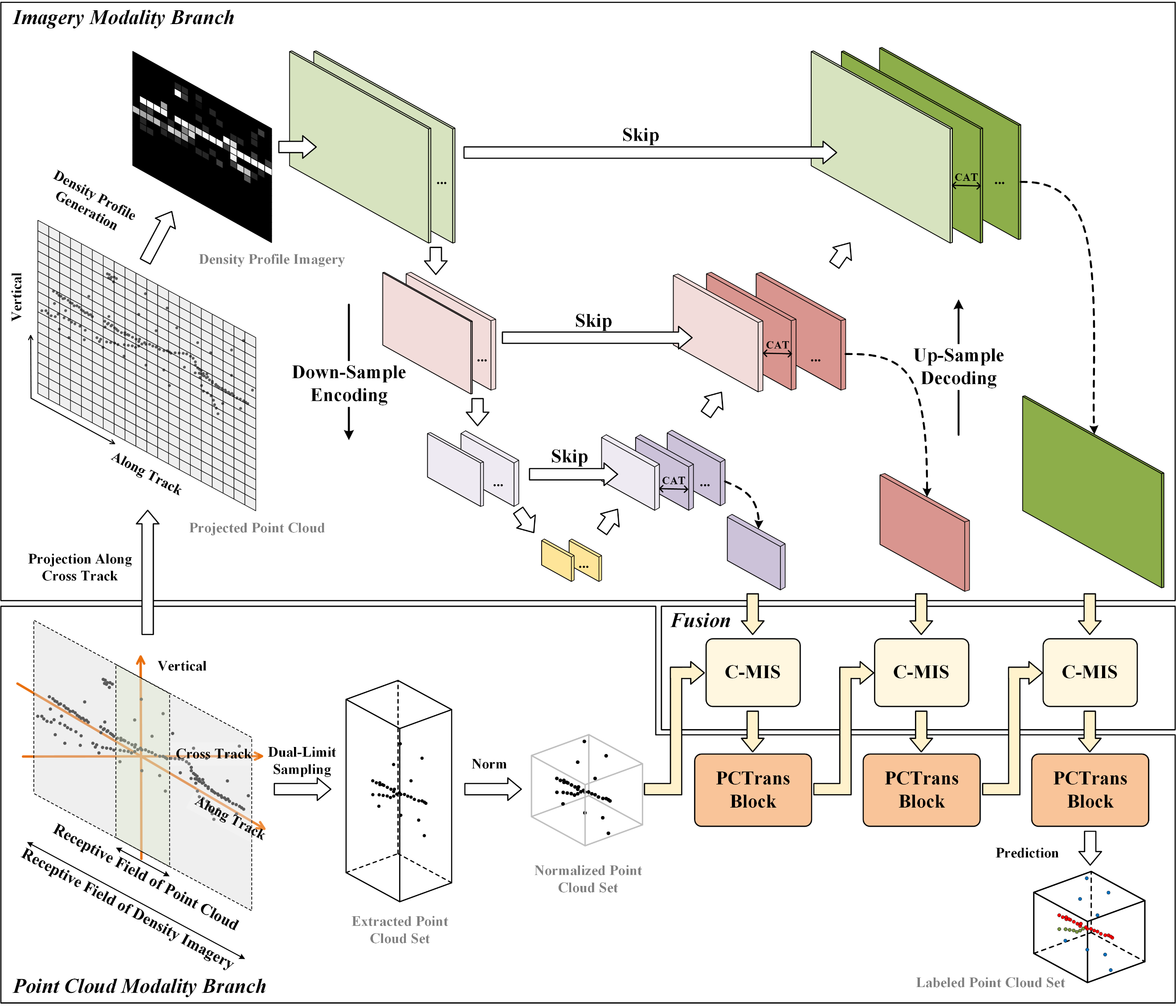
图1 DECOMPOSE模型结构
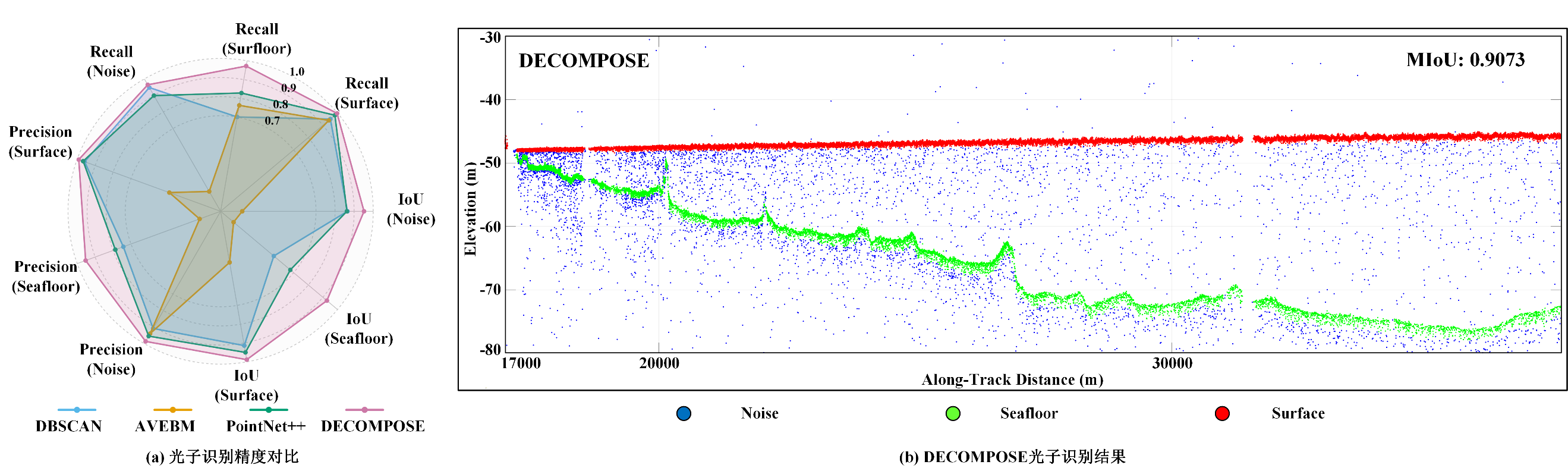
图2 (a)光子识别精度指标对比,以及(b)DECOMPOSE光子识别推理效果
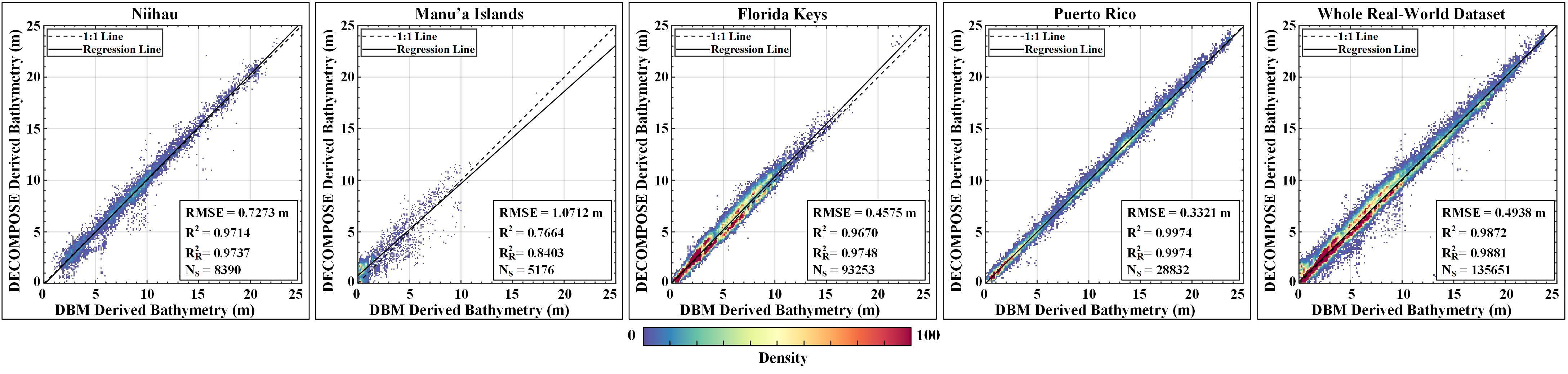
图3 DECOMPOSE在真实世界各站点的探测水深与实测水深之间的散点密度图
在此基础上,研究团队进一步将所提方法与多光谱遥感水深反演方法融合,构建了一种数据驱动的主被动融合卫星测深方法(DAPF-SDB),实现了无需地面实测水深控制点的全覆盖浅海地形测绘。如图4所示,该方法在第一阶段部署DECOMPOSE,利用目标区域内ICESat-2观测数据实现稀疏水深点的精确探测,并与多光谱遥感影像进行对齐采样;第二阶段引入多尺度分辨率融合模型(MuSRFM),利用少量 ICESat-2 测深控制点对MuSRFM进行域适应校正,使其能够适应观测环境变化并稳健推理,从而高效获取整个测区的水深信息。基于图5所示佛罗里达礁岛群的推理结果,在无地面水深数据参与、完全依赖星载观测的情况下,DAPF-SDB依然能够获得可靠的反演精度,特别是在浅水区域表现突出,表明该方法具有良好的泛化能力与应用前景。
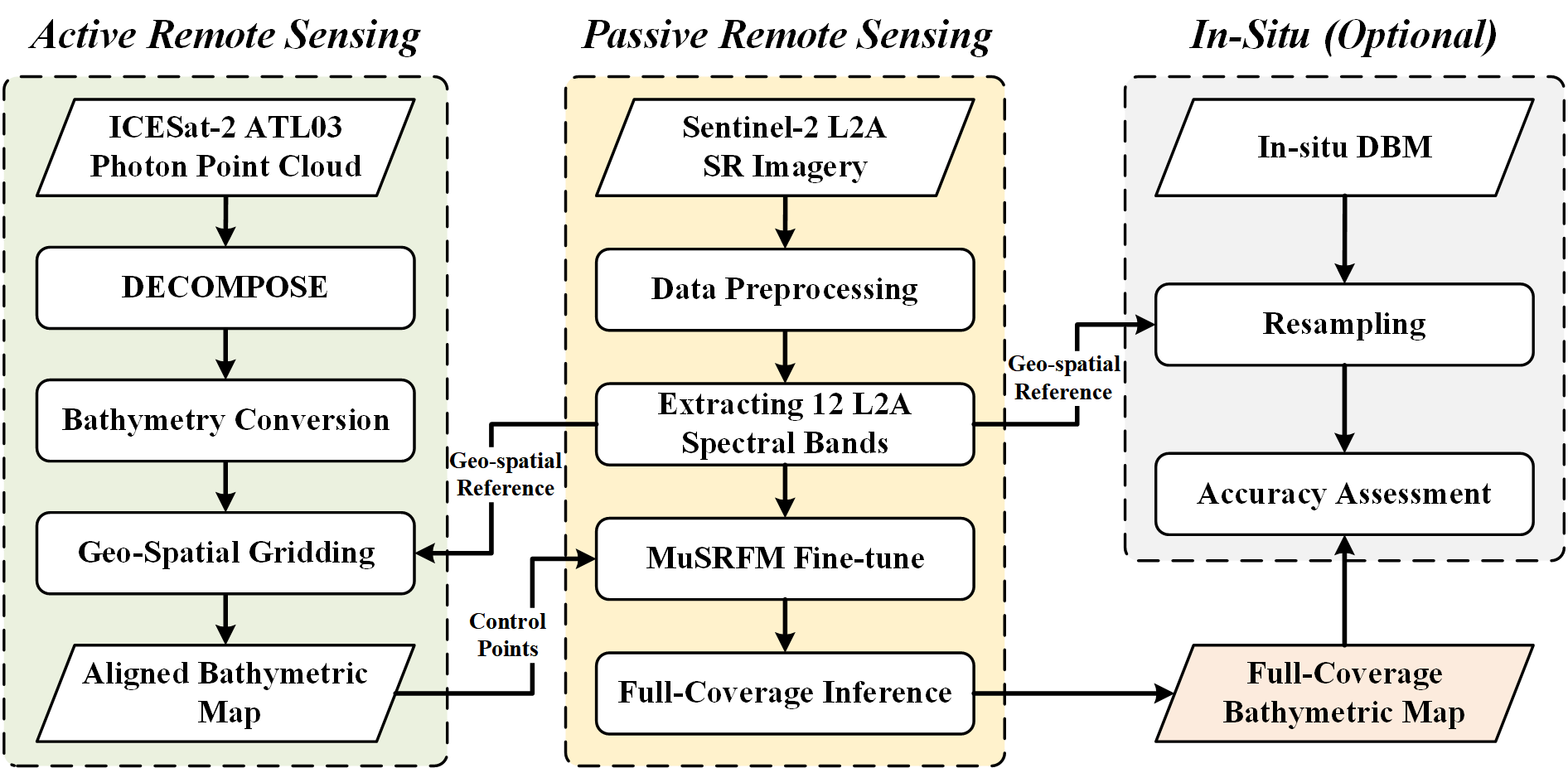
图4 DAPF-SDB整体流程
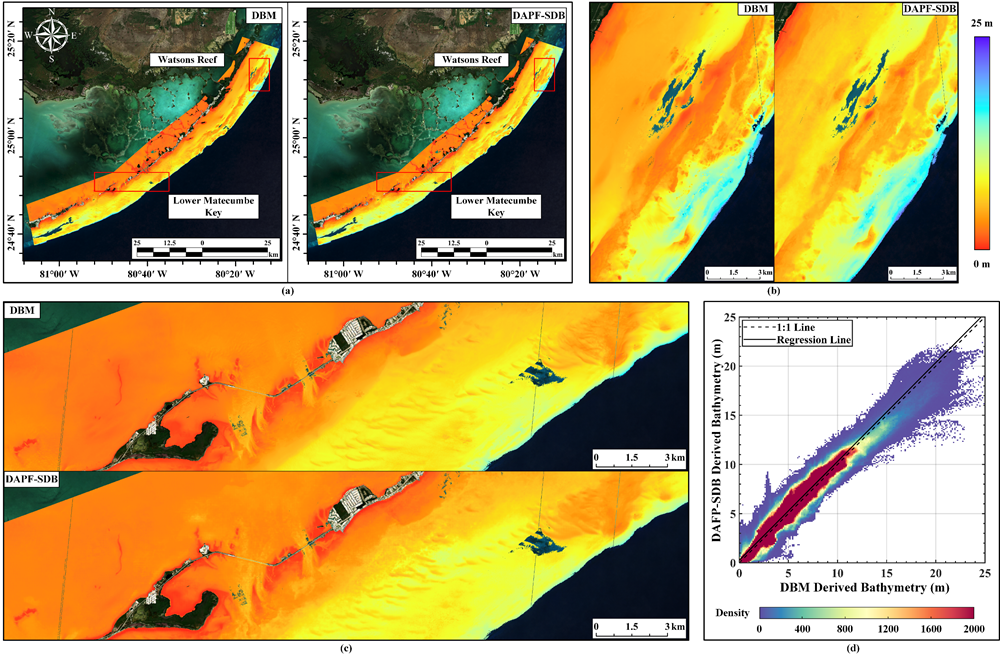
图5无实测水深控制点条件下,(a)佛罗里达礁岛群区域DAPF-SDB 预测水深及真值DBM 整体对比,(b)下马泰坎伯礁岛和(c)沃森礁的局部放大对比,以及(d)预测值和真值的散点密度图
文章信息
研究成果发表于国际地球科学Top期刊《IEEE Transactions on Geoscience and Remote Sensing》,受国家重点研发计划、海底科学国家重点实验室专项科研基金等项目资助。
Qin X, Wu Z*, Luo X, et al., “A Novel ICESat-2 Bathymetry Model Guided by Photon Density Profiles and Synergy with Sentinel-2 for Automated Seafloor Mapping Without In-Situ Data,” IEEE Transactions on Geoscience and Remote Sensing, vol. 64, pp. 1-24, 2026, Art no. 4203924, doi: 10.1109/TGRS.2026.3669597.
相关研究:
Qin X, Wu Z*, Luo X, et al., “MuSRFM: Multiple Scale Resolution Fusion Based Precise and Robust Satellite Derived Bathymetry Model for Island Nearshore Shallow Water Regions Using Sentinel-2 Multi-Spectral Imagery,” ISPRS Journal of Photogrammetry and Remote Sensing, vol. 218, pp. 150-169, 2024, doi: 10.1016/j.isprsjprs.2024.09.007.
